 The National Science Foundation has awarded ME Assistant Professor Kenn Oldham a Faculty Early Career Development (CAREER) award for his research on “Power Optimization in Autonomous Microsystems via Integrated Motion Control.” CAREER awards recognize junior faculty who “exemplify the role of teacher-scholars” through outstanding research and education.
The National Science Foundation has awarded ME Assistant Professor Kenn Oldham a Faculty Early Career Development (CAREER) award for his research on “Power Optimization in Autonomous Microsystems via Integrated Motion Control.” CAREER awards recognize junior faculty who “exemplify the role of teacher-scholars” through outstanding research and education.
The primary application of Oldham’s research is the control of terrestrial, autonomous micro-robots. Oldham has been working with collaborators at the U.S. Army Research Laboratory on the development of these miniature walking robots, with the goal of equipping them with insect-like mobility. “There is a fundamental tradeoff between high mobility and range of motion and carrying a lot of weight,” said Oldham. “This tradeoff gives us some extremely strict power budgets that we’re forced to meet.” The Army Research Office‘s interest in these robots is defense-oriented, although Oldham predicts that the research will have a larger impact.
“One can generalize the robots for use in other applications,” he said. Examples of direct robot applications include infrastructure maintenance and disaster response, situations that capitalize on the robots’ small-size, high-mobility, and relative expendability. “Or,” continued Oldham, “one can take what one learned from these robots and apply it to other microsystems.” For example, the power systems used by the robots could be incorporated into various biomedical devices, such as capsule endoscopes. “Given some rudimentary level of locomotion, you’re still power-constrained,” said Oldham of the capsule endoscope application. “You can use exactly the same [power-saving] algorithms.”
With these applications as the goal, his research will explore strategies for minimizing power consumption of autonomous microsystems. At the microscale, energy loss in circuitry can outweigh energy usage of actuators, an important factor that can be ignored in larger devices. According to Oldham, this issue could be addressed using a variety of strategies, but he has chosen to approach it from the perspective of his personal research interests: “I come from a controls background and really look at it from a control systems standpoint,” he said. In order to minimize total energy expenditure, Oldham is attempting to coordinate actuator, control system and circuit design. This approach utilizes switching control theory, where the various components of a microsystem are regulated through proper timing of commands. Although this strategy has been used before in power electronics, Oldham’s research also employs switching control for motion control of microactuators, as well as electronics. This approach opens new research opportunities as a variety of non-linear forces and small-scale energy losses become important at the micro-scale, while system design can be optimized in parallel with controller development.
A major component of the CAREER award is the proposal of a creative and integrative education plan developed within the context of the awardee’s mission. Oldham finds this aspect of the award especially exciting. He hopes to develop an educational tool than can be broadly disseminated with the goal of teaching students about different power sources and how force is transferred. “We have a whole bunch of simulation tools for looking at the tradeoff between different power sources and seeing how well the robot works,” he explained. “You could take stripped-down versions of these simulations and turn them into an online or web-based build-your-own-robot tool.” He is also interested in drawing on the expertise of the Art and Design School or the EECS department for assistance in designing this project.
In the CoE’s Vibration and Acoustics Laboratory, Oldham serves as principal investigator in the area of microsystems. His other research in this capacity focuses mainly on biomedical applications. Currently, he is working with a team from the ME, BME, and internal medicine departments on endoscopic microscopy systems, and specifically on actuator development for these systems.
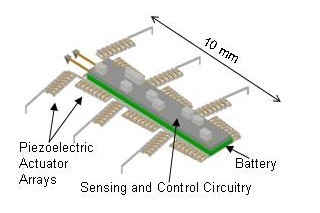
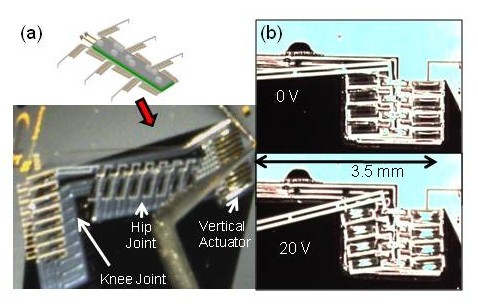
Concept drawing of a bio-inspired micro-robot based on
piezoelectric MEMS actuators
