Improving the functionality of robotic and manufacturing systems “comes down to understanding your system and identifying a strategy for improving performance,” says ME Assistant Professor Kira Barton, whose laboratory combines fundamental and experimental modeling and controls research, from multi-agent coordination to additive manufacturing. Often, those improvement strategies involve cooperation.
ENHANCING COOPERATION UNDERSEA
Barton’s group looks at how to enable and enhance cooperative behavior between and among systems in a range of environments. In a project with the Brookfield Zoo in Chicago, she is collaborating with U-M ME assistant research scientists Alex Shorter and Lauro Ojeda, and Matthew Johnson-Roberson, assistant professor in the Naval Architecture and Marine Engineering department, to investigate interactions between dolphins and autonomous underwater vehicles.
“Autonomous systems are controllable and yet they’re operating in the same environments as biological systems, which are not. What we aim to learn is how we can achieve the objective of the autonomous system — in our project, the task is to map real-time environmental conditions — while minimizing disturbances to the biological system,” Barton explained.
The environmental data collected will provide contextual information to supplement on-animal measurements taken by bio-logging tags, while the two systems simultaneously meet a cooperative agent objective.
The objective is to better understand the animals’ interactions with the autonomous systems and the potential effects. For example, how does the presence of the autonomous systems change the dolphins’ behavior? What impact might they have on the dolphins’ energy use? How can the autonomous systems “learn” and adapt their behavior through more effective control strategies?
Investigators will use video to validate the localization and sensor data and algorithms in the controlled environment at the zoo before conducting similar future experiments in the wild.
“Gathering this type of information about the animals should help answer some important biological questions,” Barton said.
WALKING TO LEARN
Cooperation between systems and the way in which each system learns and adapts to the other is the focus of a second collaborative project. In addition to Barton’s group, investigators from the ME department include Ojeda as well as Professor Albert Shih and Research Professor James Ashton Miller. Outside the ME department, collaborators include Professor Thomas Armstrong of Industrial and Operations Engineering; Professor Toni Antonucci of Psychology; Deanna Gates, of Kinesiology; and Emily Mower Provost, of Computer Science and Engineering.
The multidisciplinary team is designing a customized human assistive device, a 3D-printed ankle-foot orthosis, ultimately capable of learning and adapting to its user. If users are fatigued, the device could augment their efforts; if users are improving, for example healing from an injury, the device could provide less support.
The key to device control will be an adaptive, learning-based controller developed by Barton’s laboratory that incorporates models of both device and human behavior, including human intent.
“Developing the models and building a control framework for human intention during walking can smooth transitions between movements and make the interactions between human and device much more symbiotic,” Barton said.
COOPERATION AND CONTROL ON THE FACTORY FLOOR
In the manufacturing environment, systems-level modeling and control of cooperative behaviors can help enterprises detect malfunctions during a process, localize problems, isolate the malfunctioning machine, i.e. robot, and potentially reroute production until the issue can be resolved.
“Cooperation among robots in a manufacturing system can save companies significant amounts of money in terms of preventing lost productivity when you don’t have to shut down the entire line,” Barton said.
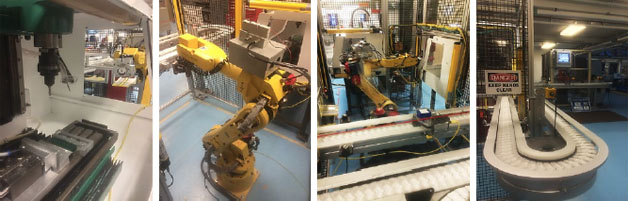
The research, a collaboration with ME Professor Dawn Tilbury and Computer Science and Engineering Professor Morley Mao, is being conducted on a System-level Manufacturing and Automation Research Testbed (SMART). First built within the U-M Engineering Research Center for Reconfigurable Manufacturing Systems in the early 2000s, the testbed has recently been upgraded in partnership with Rockwell Automation and equipped with the latest manufacturing and control system technologies.
“Our testbed is unusual in terms of its capacity,” Barton said, “and we leverage it a tremendous amount. We don’t only run simulations; we can validate our work experimentally on a real manufacturing setup, with robots, milling machines, conveyors, state-of-the-art safety and connection to the cloud.”
The project already has created new opportunities for more than a dozen undergraduate and graduate students in the U-M Multidisciplinary Design Program. Students work in teams on both fundamental and experimental problems, including modeling, simulation, controls, sensor design, integration, and analytics in the Cloud.
The diverse projects in Barton’s lab share a common thread. “It all comes back to control,” she said. “How do we understand systems and devise strategies and tools for making them do what we need them to do? That’s our foundation and, from there, our lab’s passions, interests and skills take us in many interesting directions.”