Modeling, Optimization and Control to Improve Health and Safety

To ensure that the systems they design will operate as intended, engineers construct controllers which ensure the largest possible set of configurations of a system behave as intended. This is no easy task, and its complexity is compounded when trying to devise models for systems that include humans, since they are constantly interacting with a changing environment in difficult to predict ways.
“The hard part of figuring out how to control a system is understanding how to grapple with the uncertainty of human beings; in a sense, we are the wildcard,” said ME Assistant Professor Ram Vasudevan, who directs the Robotics and Optimization for the Analysis of Human Motion (ROAHM) Laboratory.
Understanding Human Interactions with the Environment for Fall Prevention
A primary application of Vasudevan’s work has been to improve individual stability to prevent falls, a leading cause of accidental injury and death. Particularly among the elderly, a fall and its resulting injuries can have a tremendous impact on one’s independence and quality of life.
Currently doctors and physical therapists use only heuristic measures to gauge an individual’s risk of falling. In contrast to diabetes and heart disease, explained Vasudevan, there exists no automated tool to aid healthcare providers in definitely predicting a risk of falls.
“As a result, diagnosing or rehabilitating those at a higher risk for falls must rely entirely upon human intuition. Such an approach will not scale as the population ages,” said Vasudevan.
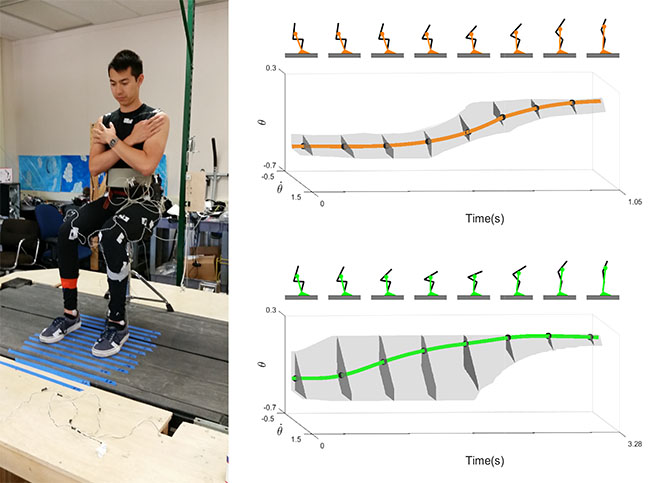
The BOS corresponds to the set of states that ultimately result in standing for a single strategy. The BOS indicates the amount of perturbation, such as stepping on ice or colliding with an object, that a person can withstand.
For any given motion, a larger BOS corresponds to a lower probability of falling. In the instance of standing up, the BOS would correspond to all states of the individual that are able to get upright despite disturbance. Since standing is critical to many activities of daily living, detecting a reduction of the BOS for standing can identify individuals who are at higher risk of falling.
Moreover, if a portion of the BOS is lost, with age or injury, the set of states that have left the BOS could correspond to specific biomechanical deficiencies. Monitoring the shape of a patient’s BOS over time could help therapists design personalized rehabilitation programs to maximize stability.
Vasudevan uses motion capture data from an entire sit-to-stand motion to calculate a BOS for each individual. His approach is the first to enable automation of personalized stability analysis, and provides detailed information about when and how a person’s stability changes while standing up.
Similar strategies also can be employed to construct controllers that improve the stability of legged robotic systems despite terrain that is difficult to model. The ROAHM Lab is currently conducting research on legged robotic systems in collaboration with Assistant Professor David Remy with support from the National Science Foundation.
Human-Machine Interactions in Autonomous Vehicles
Autonomous vehicles hold the promise of improving vehicle safety by reducing accidents that arise from driver error. While autonomous vehicles can perform well in known conditions, they are unable to deal with uncertainty, such as other vehicles, pedestrians or imperfect knowledge of environmental conditions.
To address this, Vasudevan’s research group is taking a three-pronged approach: building models of intent, exploring techniques to develop automated interventions despite uncertainty, and devising automated techniques to validate these new systems.
“What we’re trying to capture in our models is information about the intent of drivers — how might they shift hands in relation to the steering wheel when their phone alerts them to an incoming text message, or when the vehicle suddenly encounters a patch of ice and loses traction?” Vasudevan explained. “The algorithms we’re developing can help decipher what drivers are capable of doing.”
To construct these models, Vasudevan is working in collaboration with the U-M’s Transportation Research Institute, to leverage over 30 million miles’ worth of driving data collected through the Ann Arbor Connected Vehicle Test Environment.
“That data is a treasure trove,” said Vasudevan. “It’s an order of magnitude larger than data collected in other major autonomous vehicle research efforts, and — this is one positive aspect of Michigan winters — collected in more inclement, and therefore uncertain, conditions.”
In addition, Vasudevan is leading the academic side of Ford’s autonomous vehicle effort. He is leveraging these constructed models of human behavior to devise optimization methods that can, in real-time, safely control an autonomous vehicle. In addition to providing financial support for several students, this collaboration includes direct control by Vasudevan of several autonomous vehicles that are housed at U-M.
“Autonomous systems have the potential to drastically improve the lives of humans,” said Vasudevan. “However, their success will depend entirely upon devising algorithms that understand human behavior and motion.”
